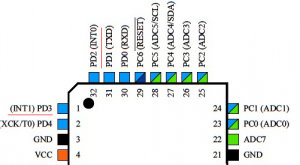
В контроллерах Atmega8 есть только 2 входа для внешнего прерывания, это вывода PD2 (INT0) и PD3(INT1):
 Для настройки прерывания используют следующие реестры:
GICR:
Для настройки прерывания используют следующие реестры:
GICR:
 В данном регистре нас интересуют 6 и 7 бит. Установка данного бита в 1 разрешает прерывания INT0 или INT1.
MCUCR:
В данном регистре нас интересуют 6 и 7 бит. Установка данного бита в 1 разрешает прерывания INT0 или INT1.
MCUCR:
 В данном регистре нас интересуют биты 0-3:
Бит 0-1 отвечают за настройку прерывания INT0, бит 2-3 отвечают за настройку прерывания INT1.
В данном регистре нас интересуют биты 0-3:
Бит 0-1 отвечают за настройку прерывания INT0, бит 2-3 отвечают за настройку прерывания INT1.
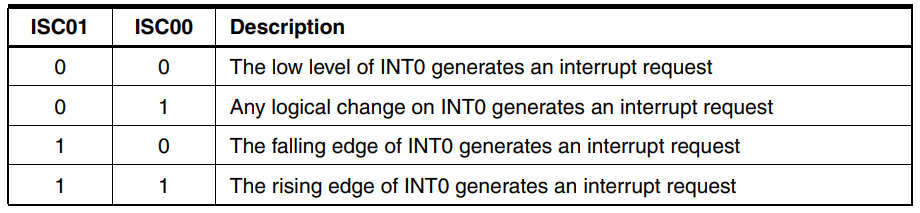 Значения бит ISC01 и ISC00:
Значения бит ISC01 и ISC00:
Для настройки прерывания используют следующие реестры:
GICR:
В данном регистре нас интересуют 6 и 7 бит. Установка данного бита в 1 разрешает прерывания INT0 или INT1.
MCUCR:
В данном регистре нас интересуют биты 0-3:
Бит 0-1 отвечают за настройку прерывания INT0, бит 2-3 отвечают за настройку прерывания INT1.
Значения бит ISC01 и ISC00:
| ISC01 | ISC00 | Значение |
| 0 | 0 | Прерывание вызывается по уровню лог.0 на входе INT0. |
| 0 | 1 | Прерывание вызывается по изменению любого состояния. |
| 1 | 0 | Прерывание вызывается по ниспадающему фронту сигнала на входе INT0. |
| 1 | 1 | Прерывание вызывается по возрастающему фронту сигнала на входе INT0. |
Прерывания по входу INT1 настраиваются так же
Так же необходимо разрешить глобально работу прерывания, выполняется это командой:
sei();//Разрешить прерывания
или через реестр:
SREG|= (1<<7); //разрешить общие прерывания
Для проверки работы прерывания, мы подключим к ножкам PD0 и PD1 светодиоды, а к ножке PD2 и PD3 кнопки, при нажатии на которых мы будем включать/выключать светодиоды. Так же мы дополнительно подключим к ножке PD4 светодиод, который будет переключать свое состояние раз в пол секунды — имитация работы самостоятельного программного кода . Пример кода (переключения светодиодов HL1 и HL2 происходят в не рабочего цикла):
