Страница на этапе разработки
Сегодня мы с Вами настроим среду программирования для микроконтроллеров TMS320. Работать мы с Вами будем в Code Composer Studio. Данное программное обеспечение можно бесплатно скачать на сайте производителя. Работать мы с Вами будем с программатором, который расположен на плате TMS320-XDS100-V3:
Полную документацию на данный программатор можно посмотреть на сайте производителя.
В качестве изучения будем использовать микроконтроллер TMS320F28027, который расположен на плате :

Данная плата удобна тем, что на ней уже расположено питание микроконтроллера, кварц и минимальная необходимая обвязка.
Внутренняя периферия микроконтроллера TMS320F28027: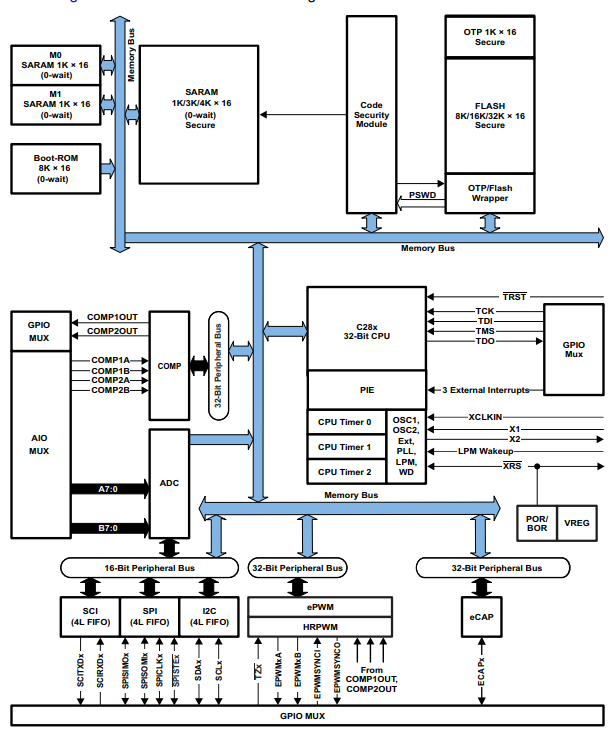
А так же назначение ножек: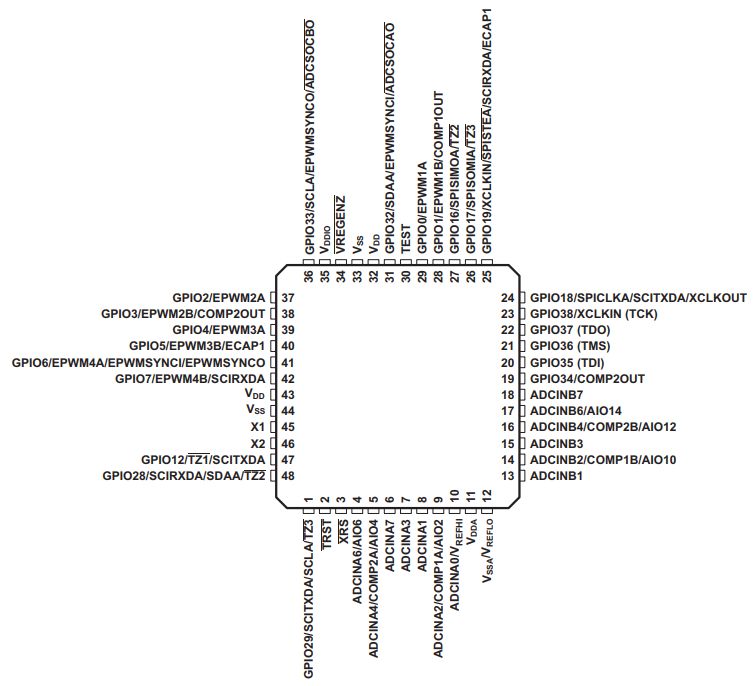 Так же необходимо помнить, что напряжение питания данного микроконтроллера составляет 3,3В.
Так же необходимо помнить, что напряжение питания данного микроконтроллера составляет 3,3В.
Так как настройка данного микроконтроллера имеет свои особенности, мы для проверки работы нашего программатора и микроконтроллера зальем пустой код, а уже в следующих уроках будем разбирать его особенности в работе.
Так же кроме непосредственно самой программы code composer studio нам понадобиться установить c2000ware.
Для проверки правильности установления ПО и работы самого программатора с микроконтроллером, мы вначале создадим пустой проект, в настройках которого мы проверим соединения нашего прогамматора с нашим ПО, для этого необходимо ****
Теперь мы откроем пример **** удалим с него все данные и запишем следующий код:


