#define FORWARD 0
#define BACKWARD 1
#define NOREADY 0
#define READY 1
#define INIT 3
volatile uint8_t encoder_status = INIT;
volatile uint8_t encoder_direction = FORWARD;
void usart_init(void)
{
/* Enable USART1 and GPIOA clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
/* Configure the GPIOs */
GPIO_InitTypeDef GPIO_InitStructure;
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure the USART1 */
USART_InitTypeDef USART_InitStructure;
/* USART1 configuration ——————————————————*/
/* USART1 configured as follow:
— BaudRate = 115200 baud
— Word Length = 8 Bits
— One Stop Bit
— No parity
— Hardware flow control disabled (RTS and CTS signals)
— Receive and transmit enabled
— USART Clock disabled
— USART CPOL: Clock is active low
— USART CPHA: Data is captured on the middle
— USART LastBit: The clock pulse of the last data bit is not output to
the SCLK pin
*/
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
/* Enable USART1 */
USART_Cmd(USART1, ENABLE);
}
void USARTSend(const unsigned char *pucBuffer)
{
while (*pucBuffer)
{
USART_SendData(USART1, *pucBuffer++);
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET)
{
}
}
}
void encoder_init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//Канали TIM3_CH1, TIM3_CH2 як вхід з підтяжкою
GPIO_InitTypeDef gpio_cfg;
gpio_cfg.GPIO_Mode = GPIO_Mode_IPU;
gpio_cfg.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
gpio_cfg.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOA, &gpio_cfg);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
// Налаштовуємо TIM3
TIM_TimeBaseInitTypeDef TIMER_InitStructure;
TIM_TimeBaseStructInit(&TIMER_InitStructure);
// Встановлюємо TIM_Period = 1. Таймер рахуватиме до 1. Переривання буде викликатися при кожній зміні положення енкодера
TIMER_InitStructure.TIM_Period = 1;
TIMER_InitStructure.TIM_CounterMode = TIM_CounterMode_Up | TIM_CounterMode_Down;
TIM_TimeBaseInit(TIM3, &TIMER_InitStructure);
// Налаштовуємо Encoder Interface та дозволяємо переривання
TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM3, ENABLE);
NVIC_EnableIRQ(TIM3_IRQn);
}
void TIM3_IRQHandler(void)
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
// Перше спрацювання відкидаємо. encoder_status == INIT може бути тільки один раз
if (encoder_status == INIT)
encoder_status = NOREADY;
else
encoder_status = READY;
/* У регістрі TIM3_CR1 біт TIM_CR1_DIR буде напрямок обертання енкодера*/
encoder_direction = (TIM3->CR1 & TIM_CR1_DIR ? BACKWARD : FORWARD);
}
}
int main(void)
{
char buffer[80] = {`\0`};
usart_init();
encoder_init();
while (1)
{
if (encoder_status)
{
encoder_status = NOREADY;
if (encoder_direction == FORWARD){
sprintf(buffer, «FORWARD\r\n»);
//….
}
else{
sprintf(buffer, «BACKWARD\r\n»);
//….
}
USARTSend(buffer);
}
}
}
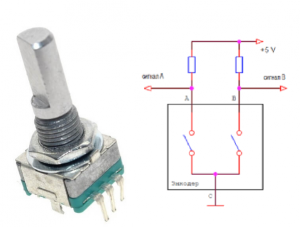
 При кручении ручки влево или в право у нас на выходе меняются состояния логических уровней, считывая эти состояния мы и определяем направление вращения ручки.
При кручении ручки влево или в право у нас на выходе меняются состояния логических уровней, считывая эти состояния мы и определяем направление вращения ручки.
