В этом примере мы разберём базовый принцип цифровой фильтрации на микроконтроллере STM32F411.
Задача простая: у нас есть полезный сигнал, к нему добавлены две высокочастотные помехи, после чего мы пропускаем полученный сигнал через цифровой фильтр нижних частот и получаем очищенный сигнал.Сам сигнал мы сформируем внутри микроконтроллера: STM32 сам создаёт рабочий сигнал, добавляет к нему помехи, фильтрует результат и отправляет данные по UART для отображения на графике.
1. Создаём рабочий сигнал и накладываем на него помехи
В нашем примере используются такие параметры:
Полезный сигнал: 200 Гц
Первая помеха: 600 Гц
Вторая помеха: 900 Гц
Частота дискретизации: 4000 Гц
Фильтр: ФНЧ 4-го порядка
Частота среза фильтра: 300 ГцТо есть полезный сигнал находится на частоте 200 Гц, а помехи находятся выше — на 600 Гц и 900 Гц.
Задача фильтра — оставить сигнал 200 Гц и подавить помехи 600/900 Гц.
2. Формирование чистого сигнала
Сначала формируется нормальный полезный сигнал:
clean = sinf(2.0f * PI_F * 200.0f * t);Это обычная синусоида частотой 200 Гц.
Её можно представить так:
clean(t) = sin(2π · 200 · t)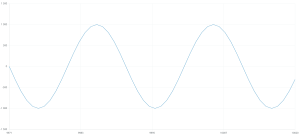
3. Добавление помехи
Дальше к полезному сигналу добавляются две дополнительные синусоиды:
noise = 0.35f * sinf(2.0f * PI_F * 600.0f * t)
+ 0.25f * sinf(2.0f * PI_F * 900.0f * t);Здесь:
600 Гц — первая помеха
900 Гц — вторая помехаАмплитуды помех специально сделаны меньше амплитуды полезного сигнала:
0.35 — амплитуда помехи 600 Гц
0.25 — амплитуда помехи 900 ГцПосле этого формируется общий входной сигнал:
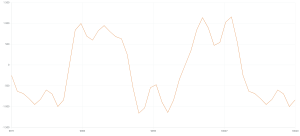
input = clean + noise;То есть на вход фильтра подаётся уже не чистая синусоида, а искажённый сигнал:
input(t) = полезный сигнал 200 Гц + помеха 600 Гц + помеха 900 ГцТакой сигнал уже нельзя нормально использовать как рабочий. На графике он выглядит как синусоида, на которую наложена быстрая высокочастотная рябь.
4. Зачем нужна частота дискретизации
Цифровой фильтр работает не с непрерывным сигналом, а с отдельными точками — отсчётами.
В нашем примере частота дискретизации:
Fs = 4000 ГцЭто значит, что микроконтроллер обрабатывает новый отсчёт каждые:
1 / 4000 = 0.00025 с = 250 мксДля этого используется таймер TIM2, который вызывает прерывание с частотой 4000 Гц. В каждом прерывании формируется новый отсчёт сигнала и сразу пропускается через фильтр.
5. Почему частота среза 300 Гц
Нам нужно оставить полезный сигнал 200 Гц и убрать помехи 600 Гц и 900 Гц.
Поэтому частоту среза фильтра выбираем между полезным сигналом и помехой:
Полезный сигнал: 200 Гц
Частота среза: 300 Гц
Помеха: 600 Гц и 900 ГцЕсли поставить частоту среза слишком низко, например 200 Гц, фильтр начнёт сильно ослаблять полезный сигнал.
Если поставить частоту среза слишком высоко, например 500 Гц, помеха 600 Гц будет подавляться плохо.
Поэтому частота среза 300 Гц хорошо подходит для нашего примера.
6. Какой фильтр используется
В программе используется цифровой фильтр нижних частот Butterworth 4-го порядка.
Фильтр нижних частот пропускает низкие частоты и подавляет высокие.
В нашем случае:
200 Гц — должен пройти
600 Гц — должен подавиться
900 Гц — должен подавиться ещё сильнееФильтр Butterworth удобен тем, что у него ровная амплитудная характеристика в полосе пропускания. Это значит, что полезный сигнал в области до частоты среза не получает сильной ряби по амплитуде.
7. Почему фильтр 4-го порядка
Чем выше порядок фильтра, тем резче он подавляет частоты выше частоты среза.
Фильтр 1-го порядка был бы слишком слабым.
Фильтр 2-го порядка уже работает лучше, но помеха 600 Гц подавлялась бы не так сильно.
Фильтр 4-го порядка хорошо подавляет обе помехи, при этом его можно реализовать из двух секций второго порядка.
8. Что такое biquad-секция
Фильтр 4-го порядка реализован как две секции второго порядка. Такие секции часто называют biquad.
Одна секция работает по формуле:
y[n] = b0·x[n] + b1·x[n-1] + b2·x[n-2] - a1·y[n-1] - a2·y[n-2]Где:
x[n] — текущий входной отсчёт
x[n-1] — предыдущий входной отсчёт
x[n-2] — входной отсчёт два шага назад
y[n] — текущий выходной отсчёт
y[n-1] — предыдущий выходной отсчёт
y[n-2] — выходной отсчёт два шага назад
b0, b1, b2 — коэффициенты прямой части фильтра
a1, a2 — коэффициенты обратной связиГлавная идея фильтра в том, что он использует не только текущий входной сигнал, но и предыдущие значения входа и выхода.
То есть фильтр имеет память.
9. Алгоритм работы одной секции фильтра
Для каждого нового отсчёта выполняются такие действия:
1. Получаем новый входной отсчёт x[n].
2. Считаем новый выход y[n] по формуле фильтра.
3. Старый x[n-1] переносим в x[n-2].
4. Текущий x[n] сохраняем как x[n-1].
5. Старый y[n-1] переносим в y[n-2].
6. Текущий y[n] сохраняем как y[n-1].
7. Возвращаем y[n] как результат фильтрации.В программе это реализовано функцией:
static float Biquad_Process(BiquadFilter *f, float x)
{
float y;
y = f->b0 * x
+ f->b1 * f->x1
+ f->b2 * f->x2
- f->a1 * f->y1
- f->a2 * f->y2;
f->x2 = f->x1;
f->x1 = x;
f->y2 = f->y1;
f->y1 = y;
return y;
}10. Как получается фильтр 4-го порядка
Одна biquad-секция — это фильтр второго порядка.
Чтобы получить фильтр 4-го порядка, используются две секции подряд:
input → biquad section 1 → biquad section 2 → filteredВ программе это выглядит так:
static float LowPassFilter_Process(float x)
{
float y;
y = Biquad_Process(&lp_section1, x);
y = Biquad_Process(&lp_section2, y);
return y;
}Сначала сигнал проходит первую секцию, затем результат первой секции подаётся на вход второй секции.
11. Коэффициенты фильтра
В программе используются уже рассчитанные коэффициенты для условий:
Fs = 4000 Гц
Fc = 300 Гц
Тип фильтра = Butterworth Low-pass
Порядок = 4Первая секция фильтра:
.b0 = 0.001782610f
.b1 = 0.003565220f
.b2 = 0.001782610f
.a1 = -1.255440470f
.a2 = 0.409013780fВторая секция фильтра:
.b0 = 1.000000000f
.b1 = 2.000000000f
.b2 = 1.000000000f
.a1 = -1.518241840f
.a2 = 0.703962660fЭти коэффициенты подходят именно для выбранной частоты дискретизации и частоты среза. Если изменить частоту дискретизации, частоту среза или порядок фильтра, коэффициенты нужно пересчитывать.
Для расчёта коэффициентов можно использовать Python и библиотеку SciPy. Ниже приведён пример программы, которая рассчитывает коэффициенты фильтра Butterworth и выводит их в формате, удобном для вставки в C-код:
import numpy as np
from scipy import signal
# Частота дискретизации
Fs = 4000.0
# Частота среза фильтра
Fc = 300.0
# Порядок фильтра
order = 4
# Расчёт Butterworth low-pass фильтра
sos = signal.butter(
order,
Fc,
btype='low',
fs=Fs,
output='sos'
)
print("SOS coefficients:")
print(sos)
print("\nCoefficients for C code:")
for i, section in enumerate(sos):
b0, b1, b2, a0, a1, a2 = section
# Обычно a0 = 1, но лучше всё равно выполнить нормирование
b0 = b0 / a0
b1 = b1 / a0
b2 = b2 / a0
a1 = a1 / a0
a2 = a2 / a0
print(f"\nSection {i + 1}:")
print(f".b0 = {b0:.9f}f,")
print(f".b1 = {b1:.9f}f,")
print(f".b2 = {b2:.9f}f,")
print(f".a1 = {a1:.9f}f,")
print(f".a2 = {a2:.9f}f,")После запуска программа выведет коэффициенты для двух biquad-секций. Именно эти значения затем переносятся в структуру фильтра в программе для STM32F411.
12. Как работает программа на STM32F411
Общая схема работы такая:
TIM2 вызывает прерывание 4000 раз в секунду
↓
создаётся чистый сигнал 200 Гц
↓
добавляются помехи 600 Гц и 900 Гц
↓
получается шумный сигнал
↓
сигнал проходит через ФНЧ 4-го порядка
↓
чистый, шумный и отфильтрованный сигналы выводятся по UARTUART выводит три значения:
clean_x1000,input_x1000,filtered_x1000Пример строки:
309,782,1Это значит:
clean = 0.309
input = 0.782
filtered = 0.001Значения умножены на 1000 специально, чтобы не использовать печать float через printf. Это упрощает работу в Keil и снижает вероятность проблем с библиотеками.
13. Настройка TIM2
Для частоты дискретизации 4000 Гц используется TIM2.
При текущей настройке STM32F411:
SYSCLK = 84 МГц
APB1 = 42 МГц
TIM2 clock = 84 МГцНастройка таймера:
Prescaler = 83
Period = 249Расчёт:
84 000 000 / (83 + 1) = 1 000 000 Гц
1 000 000 / (249 + 1) = 4000 ГцТо есть таймер вызывает прерывание каждые 250 мкс.
14. Настройка UART
В программе используется UART2 со скоростью:
921600 baudВ терминале нужно поставить:
Baudrate: 921600
Data: 8 bit
Parity: None
Stop: 1В программе стоит:
#define UART_DECIMATION 4Это значит, что фильтр работает на частоте 4000 Гц, но в UART отправляется только каждый четвёртый отсчёт:
4000 / 4 = 1000 строк в секундуЭто сделано для стабильной работы UART и терминала.
Если всё работает стабильно, значение UART_DECIMATION можно поставить равным 1. В этом случае в UART будет отправляться каждый отсчёт.
На выходе получится такой график:
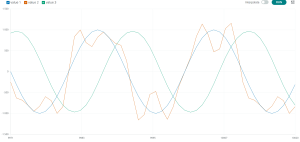
Выходной сигнал немного смещён относительно входного. Это нормальное поведение IIR-фильтра: при фильтрации возникает фазовый сдвиг.