
В данном уроке мы с Вами подключим семисегментный индикатор к нашему микроконтроллеру. Использовать будем индикатор с обратным включением:
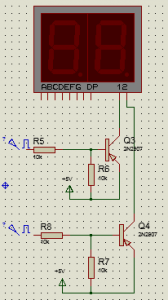
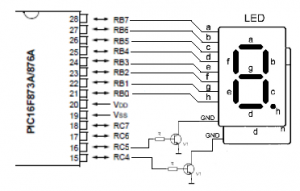
Подключать индикаторы будем к ножкамPB0 — PB7, переключение сегментов подключим к выводам PC4 и PC5:
Если у Вас семисегментный индикатор с прямым включением, Вам нужно будет заменить в программе сигналы управления на обратные ( 1 на 0 и наоборот), так же заменить ключ управления индикаторами.
Программный код: