В данном уроке мы с Вами подключим сдвиговый регистр SN74HC595 к микроконтроллеру ESP8266 с помощью языка microPython используя SPI:
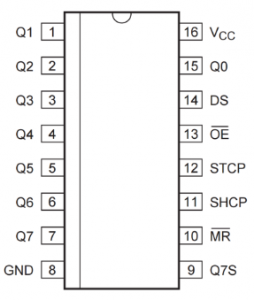
Назначение выводов:
Vcc – Питание
Q0 – Q7 – Параллельные выходы
DS – Вход для последовательных данных
OE – Вход для переключения состояния выходов из высокоомного в рабочее состояние
STCP – защелкивание выходов
SHCP – Вход для тактовых импульсов
MR – Сброс значений регистра
Q7S – Выход для последовательного соединения регистров
GND – Земля
Для работы с данным регистром выводы подключим следующим образом:
Q0-Q7 подключим светодиоды
VCC, GND – питание +5V
DS – передача данных
OE – на GND
STCP – защелкивание регистра
SHCP – синхронизация
MR – +5V
Но, для начала рассмотрим сам SPI, microPython потдерживает как программный так и аппаратный SPI. Отличаются они только скоростью работы (программный — максимум 10МГц, аппаратный — максимум 80МГц) и выводами (программный можно реализовать на всех доступных ножках, аппаратный GPIO12 (MISO), GPIO13 (MOSI) и GPIO14 (SCK)).
Теперь рассмотрим настройки SPI и работу с ним:
Инициализация для программного SPI:
from machine import Pin, SPI
spi = SPI(—1, baudrate=100000, polarity=1, phase=0, sck=Pin(0), mosi=Pin(2), miso=Pin(4))
Инициализация для аппаратного SPI:
from machine import Pin, SPI
spi = SPI(1, baudrate=800000, polarity=0, phase=0)
Как уже видно -1 указывает, что мы используем программный SPI, 1 указывает, что у нас аппаратный SPI.
polarity — указывает уровень сигнала, когда SPI не работает.
phase — выборка данных: 0 — выборка данных происходит по переднему фронту тактового сигнала, а 1 — по заднему.
Все остальное одинаково как для аппаратного так и программного SPI:
spi.init(baudrate=100000) — задать скорость коммуникации в бодах;
spi.read(10) — читает 10 байт на MISO-линии;
spi.read(10, 0xff) -читает 10 байт и передает на MOSI-линию значение «0xff»;
buf = bytearray(40) — создаем буфер для обмена данных для SPI;
spi.readinto(buf) — сохраняет считанные данные в заданный буфер(в данном случае его размер будет 40 байт);
spi.readinto(buf, 0xff) — сохраняет считанные данные в заданный буфер и передает на MOSI-линию значение «0xff»;
spi.write(b‘12345’) — записывает 5 байт на MOSI-линию;
spi.write_readinto(b‘1234’, buf) — записывает на MOSI-линию и читает из MISO-линии в буфер;
spi.write_readinto(buf, buf) — записывает данные буфера в MOSI-линию и сохраняет данные из MISO в буфер.
Для большой пользы в написании кода, мы с Вами подключим через сдвиговый регистр 74HC595 три семисегментных индикатора. У меня семисегментные индикаторы с обратным включением, если у Вас семисегментные индикаторы с прямым включении, Вам нужно будет поменять 1 на 0 в данных которые отправляем на сдвиговый регистр.
Схема подключения:
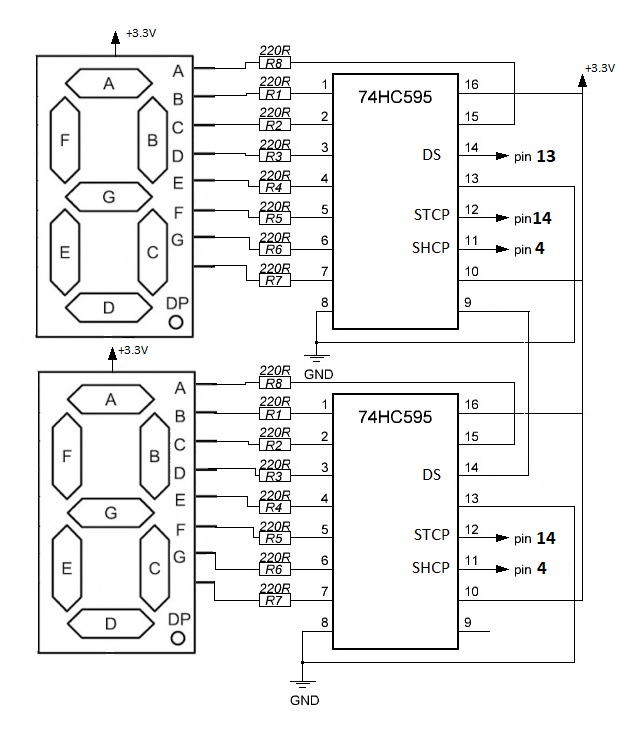
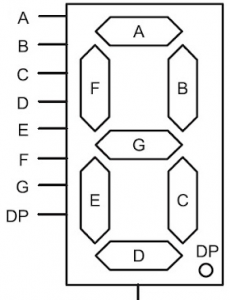
Так как семисегментные индикаторы имеют разные распиновки, я буду в программе использовать свои коды для отображения цифр, Вы сами уже под свой семисегметный индикатор составите свои коды, опираясь на картинку ниже:
Программный код:



