В данном уроке мы рассмотрим прерывания от таймеров микроконтроллера ESP8266. Используя микроконтроллер ESP8266 может активировать до 7 таймеров.
Обычно таймера в библиотеках microPython используют следующим образом:
Таймеры 2 и 3 используются, чтобы при помощи ШИМ управлять устройствами, например менять яркость светодиодов.
Таймер 5 используется для управления сервоприводом или похожими устройствами.
Таймер 6 используется для синхронизированных чтения/записи АЦП/ЦАП.
Мы с Вами будем использовать 0 и 1 таймер.
Основные методы работы с таймерами:
- Timer.init(*, freq, prescaler, period, mode=Timer.UP, div=1, callback=None, deadtime=0) :
Инициализирует таймер. Инициализацию можно выполнить либо с помощью частоты (в Гц), либо с помощью делителя частоты (prescaler) и периода (period), при этом не забываем, что значение частоты и делителя вносим на 1 меньше. Тоесть, если Вам надо период 10000, в настройки необходимо внести 9999:
# задаем, чтобы таймер срабатывал на 10 Гц:
tim.init(freq=10)
# напрямую задаем делитель частоты и период:
tim.init(prescaler=83, period=9999)
Аргументы:
- freq – задает периодическую частоту таймера.
- prescaler – претделитель, диапазон т 0 до 0чFFFF. Исходная частота таймера делится на (prescaler + 1), тем самым мы получаем рабочую частоту таймера.
- period – значение до которого считает таймер. Счетчик будет обнулен после достижения значения (period + 1). Максимальное значение зависит от типа счетчиков, и может принимать максимальное значение 0xFFFF или 0x3FFFFFFF.
- mode – режимы роботы:
Timer.PERIODIC – устанавливает режим работы таймер. Таймер будет срабатывать с заданной периодичностью.
Timer.UP – таймер будет считать с «0» до значения в которое мы занесли в period + 1.
Timer.DOWN – таймер будет считать со значения в period + 1 до «0».
Timer.CENTER – таймер будет считать с «0» до значения в period + 1, а потом обратно до «0».
- div – может быть «1», «2» или «4». Это значение, на которое делится тактовая частота, чтобы определить частоту семплирования, используемую цифровыми фильтрами.
- callback – определяется функция обратного вызова.
- deadtime – здесь задается время задержки между сигналами на комплиментарных каналах (во время этой задержки оба канала будут неактивны). Доступен не на всех таймерах, необходимо уточнять в документации.
Для работы таймера обязательно надо задать либо freq, либо одновременно prescaler и period.
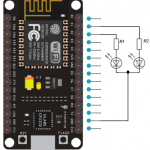
Для проверки работы прерываний от таймеров мы подключим два светодиода, которые будут включаться и выключаться с разной частотой, при этом у нас не будет задержек в программе, для реализации паузы между сменами уровня выходного сигнала: