Мьютекс — это механизм блокировки. То есть, пока не выполниться одна задача, вторая не запускается.
Для примера у нас есть два датчика которые передают данные по USART, и если они одновременно будут передавать данные, мы получим не понятный набор данных, так как они будут перемешанные. Используя мьютекс, мы запрещаем одному датчику передавать данные, до тех пор, пока второй датчик не закончит свою передачу.
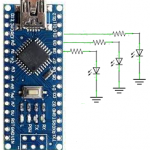
В качестве примера рассмотрим три светодиода, которые будут символизировать три задачи, которые должны выполняться друг за другом (по аналогии передачи данных), и одна задача (четвертый светодиод, который находиться на плате), которая будет выполняться сама по себе: