
Страница на этапе разработки
В данном уроке мы с Вами рассмотрим схему управления (концепцию) нагревательным элементом для домашних животных (в моем случаи клетки). У нас будет включаться тэна при понижении температуры ниже выставленной, причем с учетом безопасности домашних животных тэна у нас будет на 12В, будет включаться вентилятор обдува с обязательным контролем вращения. Так же будет индикация текущей температуры, светодиодная индикация состояния устройства, и кнопки для изменения параметров работы обогревателя.
Итак, для реализации данного проекта нам понадобиться:
- Блок питания.
- микроконтроллер Atmega8.
- Тэна на 12В.
- семисегментный индикатор
- Светодиоды, кнопки, реле и др. обвязка.
Схема нашего устройства:
- Для начала подключим индикацию:
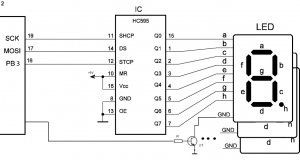
У нас индикация будет состоять из трех индикаторов (алгоритм работы у меня рассмотрен в уроках по микроконтроллерам).
Подключать мы будем следующим образом:
РС2, РС3, РС4 — подключаем к базам транзисторов которые управляют семисегментными индикаторами.
Ножки сдвигового регистра подключаем следующим образом:
SCK — PB5
MOSI — PB3
STCP — PB2
Управление тэном будет происходить с помощью реле которое будет включаться транзисторным ключом, который подключен к ножке PC5.
схема
Вентилятор будет управляться транзисторным ключом напрямую и подключен к ножке PD0, обратная связь подключена к ножке PD1:
схема
Светодиодная индикация подключена к ножкам:
PB0 — зеленый светодиод
PB1 — красный светодиод
PD5 — синий светодиод
PD6 — светодиод включения вентилятора
PD7 — светодиод включения тэны
Причем вместо отдельных светодиодов зеленого, красного и синего я взял один светодиод в корпусе которого встроены все три светодиода: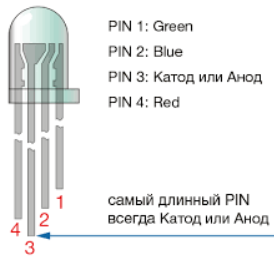
Кнопки подключены к ножкам:
PC0 — кнопка +
PC1 — кнопка —
Датчик температуры DS18B20 подключен к ножке PD2:
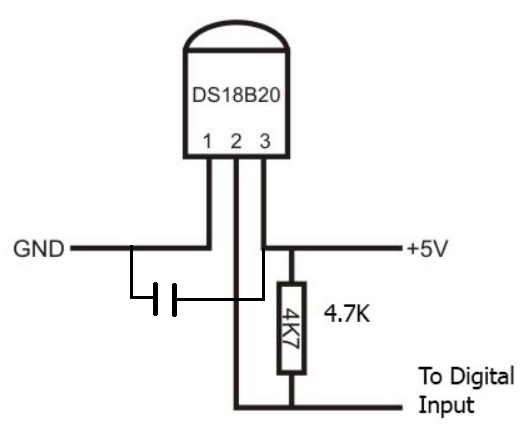
Прежде чем писать программный код, напишем алгоритм по которому у нас будет все работать: у нас на семисегментный индикатор будет выводиться температура воздуха которая заходит на тэну и по ней будет давать задание на включение/выключение тэны. Контроль работы вентилятора будет происходит по импульсам с вентилятора. С помощью кнопок мы будем выставлять желаемую температуру, значение которой будет сохраняться в памяти. Кроме того, так как мой блок питания без охлаждение, а ток потребления тэной около 10А ( у меня 100Вт тэна) — я буду раз в 30 минут на 5 минут отключать тэну, тем самым давая блоку питания остыть.
Весь программный код у меня строится на уроках которые выложены как на сайте так и на yutube канале.
Программный код: