Страница на этапе разработки
В данном уроке мы с Вами рассмотрем работы энкодера: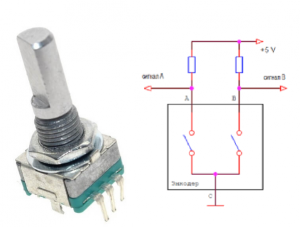 Как видно у экодера три ножки: земля, вывод А и вывод Б. Если мы с Вами крутим енкодер то в зависимости от направления вращения сначала будет замыкатьс канал А, а потом кнал Б или наоборот. Таким образом считывая состояние его ножек мы можем определить в каком направлении вращается наш энкодер и уже выполнить то или иное действие.
Как видно у экодера три ножки: земля, вывод А и вывод Б. Если мы с Вами крутим енкодер то в зависимости от направления вращения сначала будет замыкатьс канал А, а потом кнал Б или наоборот. Таким образом считывая состояние его ножек мы можем определить в каком направлении вращается наш энкодер и уже выполнить то или иное действие.
Для проверки работы энкодера мы с Вами напишем не большую программу которая будет менять яркость свечения RGB светодиода.
При этом некоторые энкодеры еще внутри себя имеют встроенную кнопку, которорую мы с Вами задействуем.
Програмный код:

