В данном уроке Мы с Вами начнем изучать Assembler и первое, что мы сделаем это поморгаем светодиодом. Изучать Assembler мы будем пошагово на примерах. Но для начала рассмотрим структуру памяти микроконтроллера Atmega8. Память микроконтроллера Atmega8 разбита на три отдельные части:
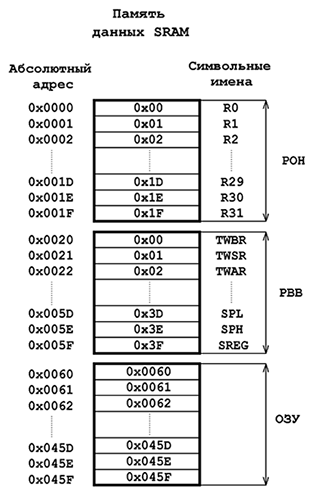
- Регистры общего назначения (РОН).
- Регистры ввода-вывода (РВВ).
- ОЗУ микроконтроллера.
При этом РОН и РВВ имеют собственное адресное пространство, который могут использовать только команды определенного типа. Все у нас 32 регистра общего назначения с символьными именами R0…R31. Данные регистры подключены непосредственно к арифметико-логическому устройству (АЛУ) и служат для обработки данных и вычислительных процессов.
Доступ ко всем аппаратным ресурсам микроконтроллера производится через РВВ. Наш микроконтроллер имеет 64 РВВ, у которых свой диапазон адресов. Символьные имена регистров и месторасположение в памяти РВВ зависит от конкретной модели микроконтроллера.
Дальше у нас идет ОЗУ, основным предназначением которого является хранение переменных нашей программы.
После подачи напряжения питания, все РОН микроконтроллера обнуляются, регистры РВВ переходят в свои значения по умолчанию, значение ячеек ОЗУ не как не сбрасываются — другими словами там храниться мусор (случайный набор 1 и 0).
Теперь мы можем начать писать нашу первую программу:

