В данном уроке мы с Вами посмотрим сколько памяти занимают наши задачи. Учитывая, что под каждую задачу выделяется память, а она в микроконтроллерах не бесконечна, — знать сколько памяти потребляют наши задачи очень актуально. Если Вы выделили больше памяти чем Вам нужно, программа будет работать но память будет не рационально использоваться. Тут все зависит от компилятора и версии системы FreeRTOS: возможны варианты когда свободная (не используемая часть памяти) будет возвращена в общую «таблицу» свободной памяти и ее можно будет использовать, или не используемая память так и останется не используемая. Лучше не полагаться на умный компилятор и версию системы и самостоятельно следить за выделением памяти. Если же память под задачу выделяется динамически — так же полезно знать сколько система выделяет под нее места, что бы в один момент у Вас не закончилась память. Если же память под задачу будет выделена меньше чем ей необходимо — микроконтроллер просто зависнет или перестанет адекватно работать.
Сегодня мы рассмотрим пример для статической памяти и увидим сколько нужно памяти для обычной задачи поморгать светодиодом.
Функции которые мы будем использовать:
UBaseType_t uxTaskGetStackHighWaterMark ( TaskHandle_t xTask );
Данная функция возвращает количество оставшейся свободной памяти, где аргументом является дескриптор запрашиваемой задачи. При этом задача может запросить свою собственную максимальную отметку, передав NULL в качестве параметра xTask.
Так же воспользуемся следующими функциями:
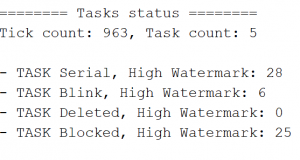
xTaskGetTickCount() — возвращает количество тиков с момента вызова vTaskStartScheduler.
uxTaskGetNumberOfTasks() — возвращает количество задач, которыми в настоящее время управляет ядро RTOS. Сюда входят все готовые, заблокированные и приостановленные задачи. Задача, которая была удалена, но еще не освобождена, также будет включена в подсчет.
char * pcTaskGetName(TaskHandle_t xTaskToQuery) — Возвращает указатель на имя данной задачи, которое представляет собой стандартную строку с нулевым завершением.
void vTaskDelete( TaskHandle_t xTask ) — Удаляет выбранную задачу, NULL приведет к удалению вызывающей задачи. При этом важно понимать, что память, выделенная кодом задачи, не освобождается автоматически и должна быть освобождена перед удалением задачи.
TaskHandle_t — Тип, на который ссылаются задачи. Например, вызов xTaskCreate возвращает (через параметр-указатель) переменную TaskHandle_t, которую затем можно использовать в качестве параметра vTaskDelete для удаления задачи.