
Подключаем энкодер к плате Arduino Nano в среде программирования Arduino Ide.
В данном уроке мы с Вами подключим энкодер к плате Arduino Nano в среде программирования Arduino IDE. При этом мы с Вами рассмотрим два варианта написания программы: без прерывания и с прерыванием.
Для начало рассмотрим алгоритм работы энкодера. Сам энкодер имеет три выхода:
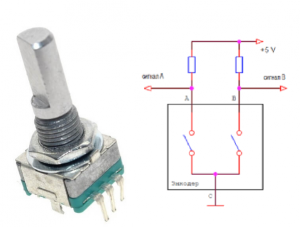 При вращении энкодера у нас у нас по очереди на ножках появляются логические нули и единицы, при этом по их последовательности мы можем понять в какую сторону вращается энкодер. Если изменений состояний ножек не происходит, — энкодер стоит на месте.
При вращении энкодера у нас у нас по очереди на ножках появляются логические нули и единицы, при этом по их последовательности мы можем понять в какую сторону вращается энкодер. Если изменений состояний ножек не происходит, — энкодер стоит на месте.
Для начала напишем программный код, который будет в цикле проверять состояние наших ножек и тем самым определять в каком направлении вращается энкодер:
#define C1 2 // первый контакт
#define C2 8 // второй контакт
int stepEnc = 0; // состояние энкодера
byte buffEnc[2]; // буффер состояния ножек
byte flagEnc = 0; // флаг изменения
void setup() {
pinMode(C1, INPUT_PULLUP);
pinMode(C2, INPUT_PULLUP);
Serial.begin(9600);
}
void loop() {
encoder(); // отслеживаем
if (flagEnc) { // если изменение было
Serial.println(stepEnc); // выводим состояние в порт
flagEnc = 0; // сбрасываем флаг
}
}
void encoder() {
static unsigned long timer;
if (timer + 5 > millis()) return; // замеряем каждые 5 мс
buffEnc[0] = buffEnc[1];
buffEnc[1] = digitalRead(C1);
if (buffEnc[0] != buffEnc[1]) { // заметили изменение сигнала на первой ножке
stepEnc += digitalRead(C2) == buffEnc[1] ? 1 : -1; // если вторая еще в плюсе, прибавляем, если уже в минусе, убавляем
flagEnc = 1; // поднимаем флаг
}
timer = millis();
} Рассмотрим программный код с использованием прерывания:
Для начала нам нужно настроить таймер, для этого мы вначале запрещаем все прерывания командой cli().
Далее нам надо настроить регистр TCCR1A, где:
бит 7 | бит 6 | бит 5 | бит 4 | бит 3 | бит 2 | бит 1 | бит 0 |
COM1A1 | COM1A0 | COM1B1 | COM1B0 | — | — | WGM11 | WGM10 |
Биты COM1A1 и COM1A0 влияют на то, какой сигнал появится на выводе OC1A (15 ножка) при совпадении счетного регистра TCNT1 со значением регистра сравнения OCR1A:
При этом необходимо учитывать режим работы таймера:
1. Обычный режим
- 00 — вывод OC1A не функционирует.
- 01 — изменение состояния вывода OC1A на противоположное при совпадении.
- 10 — сброс вывода OC1A в 0 при совпадении.
- 11 — установка вывода OC1A в 1 при совпадении.
- Режим ШИМ
- 00 — вывод OC1A не функционирует.
- 01 — если биты WGM13 — WGM10 установлены в (0000 — 1101), вывод OC1A не функционирует.
- 01 — если битыWGM13 — WGM10 установлены в 1110 или 1111, изменение состояния вывода OC0A на противоположное при совпадении.
- 10 — сброс вывода OC1A в 0 при совпадении, установка вывода OC1A в 1 если регистр TCNT1 принимает значение 0x00.
- 11 — установка вывода OC1A в 1 при совпадении, установка вывода OC1A в 0 если регистр TCNT1 принимает значение 0x00.
- Режим коррекции фазы ШИМ
- 00 — вывод OC1A не функционирует.
- 01 — если биты WGM13 — WGM10 установлены в (0000 — 1100, 1010, 1100 — 1111), вывод OC1A не функционирует.
- 01 — если битыWGM13 — WGM10 установлены в 1101 или 1011, изменение состояния вывода OC1A на противоположное при совпадении.
- 10 — сброс вывода OC1A в 0 при совпадении во время увеличения значения счетчика, установка вывода OC1A в 1 при совпадении во время уменьшения значения счетчика.
- 11 — установка вывода OC1A в 1 при совпадении во время увеличения значения счетчика, сброс вывода OC1A в 0 при совпадении во время уменьшения значения счетчика.
Биты COM1B1 и COM1B0 влияют на то, какой сигнал появится на выводе OC1B (16 ножка) при совпадении счетного регистра TCNT1 со значением регистра сравнения OCR1B:
При этом необходимо учитывать режим работы таймера:
- Обычный режим
- 00 — вывод OC1B не функционирует.
- 01 — изменение состояния вывода OC1B на противоположное при совпадении.
- 10 — сброс вывода OC1B в 0 при совпадении.
- 11 — установка вывода OC1B в 1 при совпадении.
- Режим ШИМ
- 00 — вывод OC1B не функционирует.
- 01 — вывод OC1B не функционирует.
- 10 — сброс вывода OC1B в 0 при совпадении, установка вывода OC1B в 1 если регистр TCNT1 принимает значение 0x00.
- 11 — установка вывода OC1B в 1 при совпадении, установка вывода OC1B в 0 если регистр TCNT1 принимает значение 0x00.
- Режим коррекции фазы ШИМ
- 00 — вывод OC1B не функционирует.
- 01 — вывод OC1B не функционирует.
- 10 — сброс вывода OC1B в 0 при совпадении во время увеличения значения счетчика, установка вывода OC1B в 1 при совпадении во время уменьшения значения счетчика.
- 11 — установка вывода OC1B в 1 при совпадении во время увеличения значения счетчика, сброс вывода OC1B в 0 при совпадении во время уменьшения значения счетчика.
Так как мы не будем использовать не какие режимы в регистр TCCR1A записываем 0b00000000.
Следующий регистр TCCR1B:
Регистр TCCR1B:
бит 7 | бит 6 | бит 5 | бит 4 | бит 3 | бит 2 | бит 1 | бит 0 |
ICNC1 | ICES1 | — | WGM13 | WGM12 | CS12 | CS11 | CS10 |
Биты WGM13 и WGM12 регистра TCCR1B и биты WGM11 и WGM10регистра TCCR1A устанавливают режим работы таймера/счетчика T1 (WGM13 (4) , WGM12 (3), WGM11 (1) , WGM10 (0)):
- 0000 — обычный режим.
- 0001 — коррекция фазы PWM, 8-бит.
- 0010 — коррекция фазы PWM, 9-бит.
- 0011 — коррекция фазы PWM, 10-бит.
- 0100 — режим счета импульсов (OCR1A) (сброс при совпадении).
- 0101 — PWM, 8-бит.
- 0110 — PWM, 9-бит.
- 0111 — PWM, 10-бит.
- 1000 — коррекция фазы и частоты PWM (ICR1).
- 1001 — коррекция фазы и частоты PWM (OCR1A).
- 1010 — коррекция фазы PWM (ICR1).
- 1011 — коррекция фазы и частоты PWM (OCR1A).
- 1100 — режим счета импульсов (ICR1) (сброс при совпадении).
- 1101 — резерв.
- 1110 — PWM (ICR1).
- 1111 — PWM (OCR1A).
Бит ICNC1 регистра TCCR1B управляет схемой подавления помех блока захвата (0 — выключена / 1 — включена).
Бит ICES1 регистра TCCR1B выбирает активный фронт регистра захвата (0 — по спадающему фронту сигнала и 1 — по нарастающему фронту сигнала).
Биты CS12 , CS11 , CS10 регистра TCCR1B устанавливают режим тактирования и предделителя тактовой частоты таймера/счетчика T1:
- 000 — таймер/счетчик T1 остановлен.
- 001 — тактовый генератор CLK.
- 010 — CLK/8.
- 011 — CLK/64.
- 100 — CLK/256.
- 101 — CLK/1024.
- 110 — внешний источник на выводе T1 (11 ножка) по спаду сигнала.
- 111 — внешний источник на выводе T1 (11 ножка) по возрастанию сигнала.
Таким образом мы записываем в регистр TCCR1B = 0b00001100, что означает: режим счета импульсов и коэффициент делителя 256.
Далее выставляем число с которого наш таймер начнет считать, в данном случаи для проверки состояния изменения состояния мы выберем 5ms:
OCR1A =частота процессора*время/(2*коэффициент делителя) — 1
OCR1A=16000000*0,005/(2*256)-1=155,25 округляем до 155.
И последний регистр который нам нужен TIMSK1:
бит 7 | бит 6 | бит 5 | бит 4 | бит 3 | бит 2 | бит 1 | бит 0 |
— | — | ICIE1 | — | — | OCIE1B | OCIE1A | TOIE1 |
Бит ICIE1 разрешает прерывание по захвату, биты OCIE1B и OCIE1A разрешают прерывания при совпадении, бит TOIE1 разрешает прерывание по переполнению при установке 1. Так как мы используем режим счета А:
TIMSK1 = 0b0000010;
#define A 2 // первый контакт
#define B 8 // второй контакт
int stepEnc = 0; // состояние энкодера
byte buffEnc[2]; // буффер состояния ножек
byte flagEnc = 0; // флаг изменения
unsigned long timerPrint;
ISR(TIMER1_COMPA_vect) {
buffEnc[0] = buffEnc[1];
buffEnc[1] = digitalRead(A);
if (buffEnc[0] != buffEnc[1]) { // заметили изменение сигнала на первой ножке
stepEnc += digitalRead(B) == buffEnc[1] ? 1 : -1; // если вторая еще в плюсе, прибавляем, если уже в минусе, убавляем
flagEnc = 1; // поднимаем флаг
}
}
void setup() {
pinMode(A, INPUT_PULLUP);
pinMode(B, INPUT_PULLUP);
cli();
TCCR1A = 0b00000000;
TCCR1B = 0b00001100; // x256, сброс при совпадении 1A
OCR1A = 155; // 5ms
TIMSK1 = 0b0000010; // прерывание А
sei();
Serial.begin(9600);
}
void loop() {
if (flagEnc) { // если изменение было
Serial.println(stepEnc); // выводим состояние в порт
flagEnc = 0; // сбрасываем флаг
}
}