В данном уроке мы немного изменим программу которая была описана в уроке №2, проблема была в том, что пока у нас выполняется задержка _delay_ms(), наша программа не реагирует на нажатие кнопки или другие действия.
В нашей программе мы так же будем менять скорость изменения ШИМ, при нажатии кнопки, но при этом мы не будем использовать задержки.
Схема подключения:
************************
Задержки у нас выполняются за счет прерываний TIMER2.
Реестры с которыми будем работать: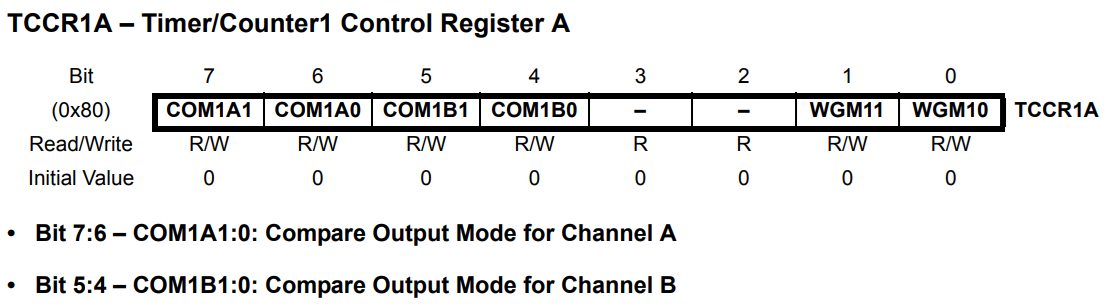
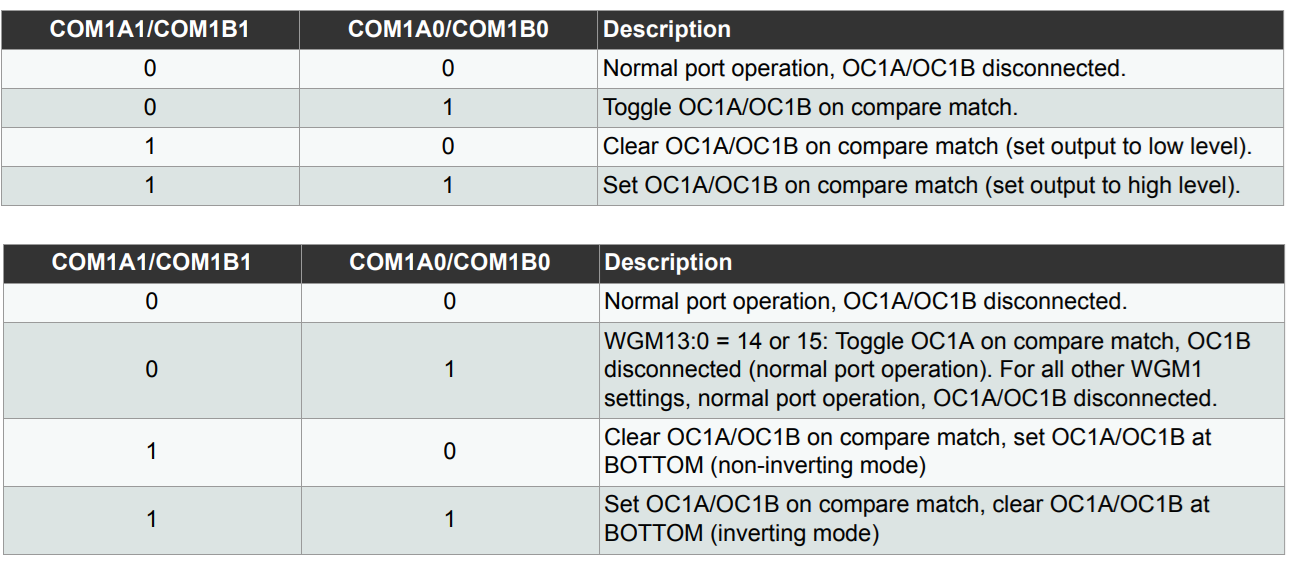
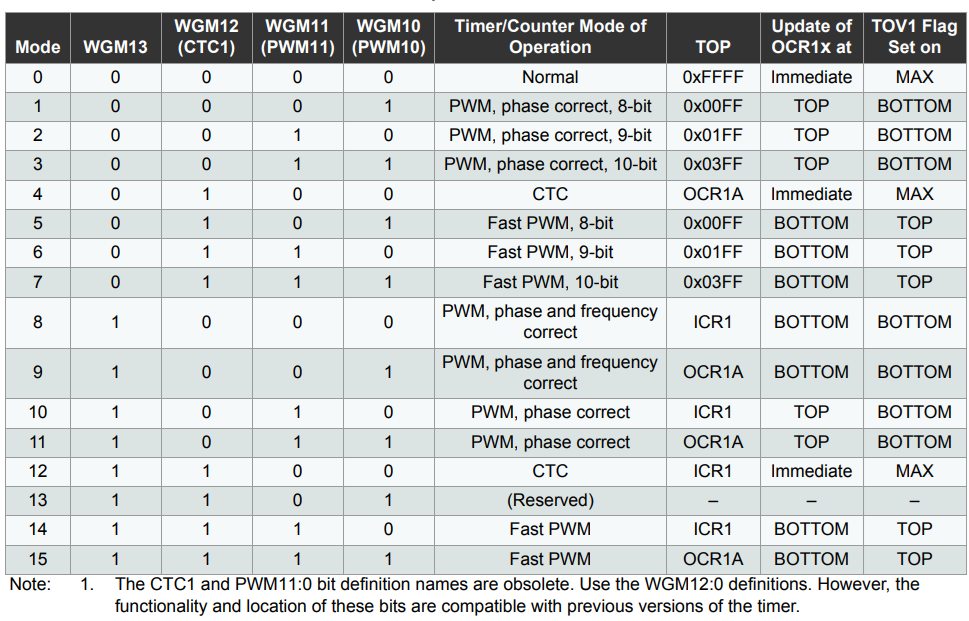
Значения битов:
Программный код:

